010
15.03.2026, 13:47 Uhr
Y21DX
|
| Zitat: | Bert schrieb
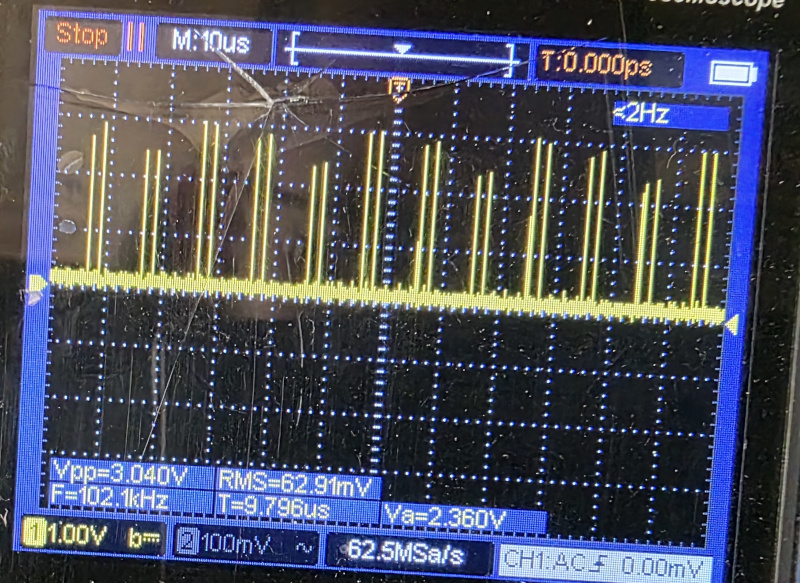
Wenn Signal 81 (/BI) 50 Hz hat und Signal 136 (/ZI) 15 kHz, sollte der VTG richtig laufen.
Dann geht es an der CPU weiten, wie René in 008 schon schrieb. |
Vielen Dank für deine Antwort!
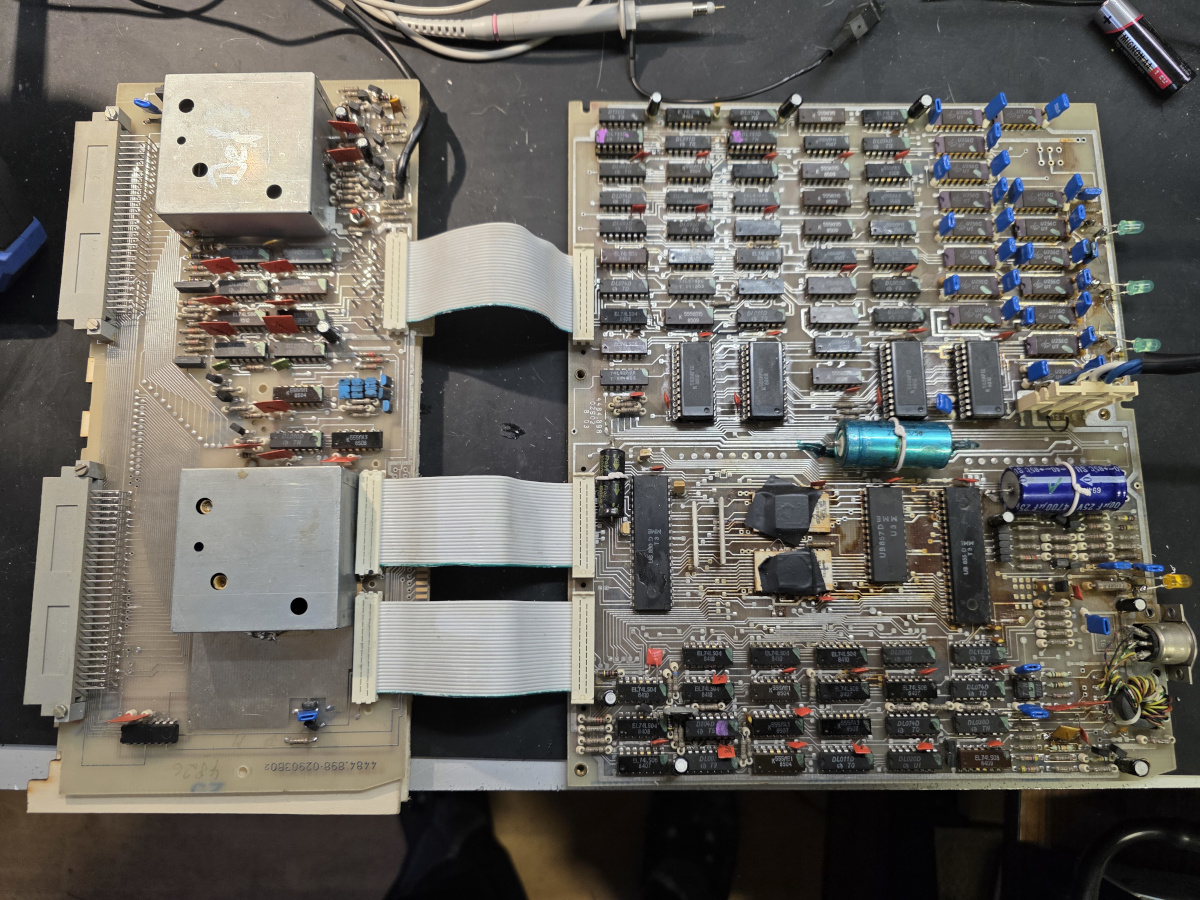
Weder an 81 (gemessen an UB875D/20) als auch 136 (gemessen an D3807/6) haben kein Signal. Woher könnte das Problem rühren?
| Zitat: | RenéB schrieb
Ich weiß nicht wer die D3801..4 sind, aber ich würde jetzt mal schauen, ob der Rechner noch etwas tut. Dafür würde ich an der CPU U880 messen
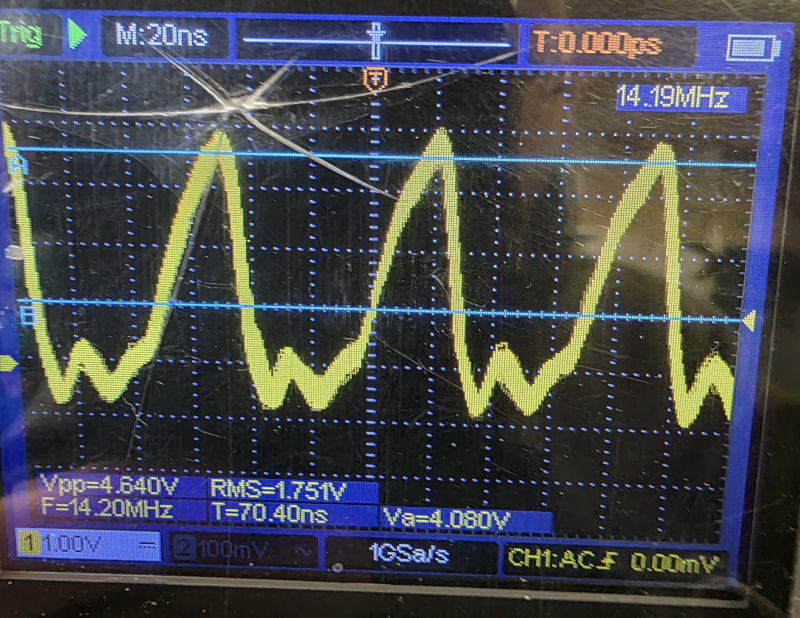
Pin6 sollte der Takt sein
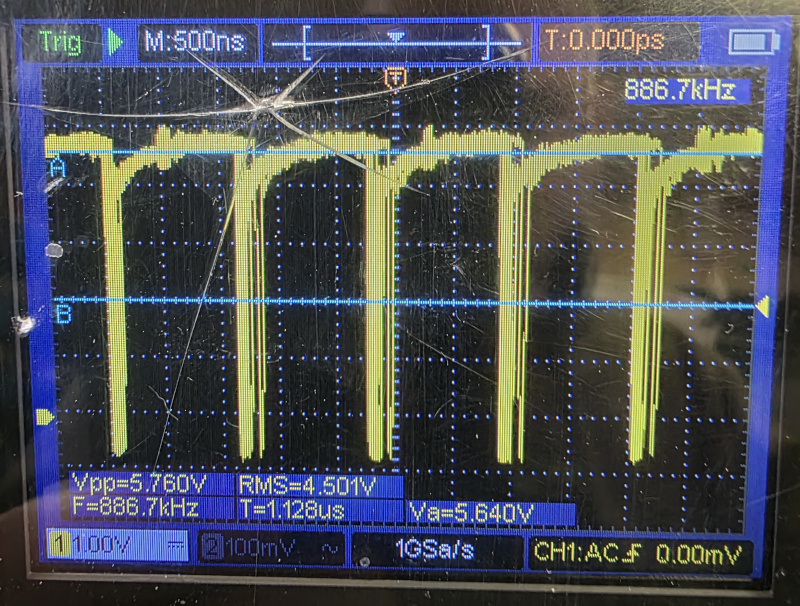
Pin 27 ist M1 , da sollte sich was tun, wenn die CPU nicht steht
Pin 19..22 sind MReq, IOrq, RD, WR. Da sollte auch was passieren ->Speicher oder IO-Zugriff
Die EPROM 2716 , wird da zugegriffen?
Pin18 ist das Chip Enable
Pin20 ist Output Enable sollten was passieren.
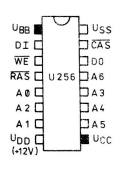
Die U256 wenn auf diese zugegriffen wird sollten
pin 4 und 15 was passieren
Pin 3 sollte sich in Abhängigkeit von U880 RD und WR sich ändern
Danach kann man schauen ob Adressen und Daten über den Bus gehen.
Grüße René |
Danke für deine Antwort, René! Das schaue ich mir als nächstes an, wenn ich herausgefunden habe, warum /ZI und /BI kein Signal führt. |